python 點云地面點濾波-progressive TIN densification(PTD)算法介紹
本篇博客參考:1)DEM generation from laser scanner data using adaptive TIN models2)Filtering airborne LiDAR data by embedding smoothness-constrained segmentation in progressive TIN densification
文章名中有超鏈接,若不方便下載,則可以在此:資源鏈接進(jìn)行下載。
1.引言1.1什么是地面點濾波?機(jī)載激光雷達(dá)(airborne light detection and ranging)/機(jī)載激光掃描(ALS, airborne laser scanning)在過去20多年的時間里迅速發(fā)展,其相對于傳統(tǒng)攝影測量影像及INSAR(干涉合成孔徑雷達(dá))可以直接記錄從地物或地表返回的密集、離散、細(xì)節(jié)豐富、精確的三維點云。如何對這些不規(guī)則點云進(jìn)行處理應(yīng)用是我們要解決的問題,其中一個重要的處理步驟就是:地面點濾波(ground filterring),簡而言之就是“在無序、不規(guī)則的三維離散點云中找到哪些是由地表返回的,哪些是由地物返回的。”
注:關(guān)于地面點濾波的概念我們要與孤立點(outlier)濾波區(qū)分開,孤立點濾波可以理解為圖像中的去噪,去除數(shù)據(jù)測量過程中受到飛鳥、多路徑效應(yīng)所產(chǎn)生的遠(yuǎn)低于/高于其他數(shù)據(jù)的點。
1.2地面點濾波的相關(guān)方法眾多學(xué)者已經(jīng)提出了各種類型的濾波算法來從ALS三維點云中自動提取地面點,根據(jù)濾波器的概念可以分為以下四類:
slope-based block-minimum surface-based clustering/segmentation algorithm基于面的地面點濾波方法的核心步驟是創(chuàng)建一個最接近裸露地表的表面,其使用了更多的context(上下文,環(huán)境、背景)信息,所以一般可以取得比其他濾波方法更好的濾波效果。此外,根據(jù)創(chuàng)建表面的方法又可以把surface-based類型濾波器分為以下三個子類:
Morphology-based filters Iterative-interpolation-based filters Progressive-densification-based filters其中Morphology-based filters使用不同尺寸大小的窗口形態(tài)學(xué)操作(opening/geodesic)來去除不同大小的地物,但是這類方法需要假設(shè)地形的坡度是一個常數(shù)。以及面臨著一個巨大的挑戰(zhàn)是在窗口大小變化的時候怎么保持地形特征不變;Iterative-interpolation-based filters是通過整個點云數(shù)據(jù)集來逐步接近地表,首先通過一個粗糙的表面來計算點云到表面的殘差,通常來說地物點會有正的差值,地面點會有負(fù)的差值。這種方法最大的挑戰(zhàn)是當(dāng)精度一定的條件下怎么來提高算法的效率;Progressive-densification-based filters與上一種方法類似,也是漸進(jìn)地把每個點逐步的分類為地面點,然而此方法不需要進(jìn)行插值。本篇博客中所介紹的PTD(progressive TIN densification)就是屬于surface-based類型中的一種Progressive-densification-based filters。
2.PTD具體介紹PTD是Axelsson在2000年左右提出的一種經(jīng)典濾波方法,在工程應(yīng)用(TerraScan)及科學(xué)社區(qū)中得到了廣泛的應(yīng)用。主要可以通過以下五個步驟進(jìn)行實現(xiàn):
2.1去除孤立點如引言中1.1所述,去除孤立點類似于圖像中的去噪操作。outliers是測量數(shù)據(jù)集中的那些遠(yuǎn)高于/低于地表的點,這中情況常常會導(dǎo)致濾波算法出現(xiàn)錯誤(例如,PTD算法中假設(shè)格網(wǎng)中的最低點為地面點,從而導(dǎo)致錯誤)。可以通過下述三個簡單步驟來去除孤立點,當(dāng)然除此之外還有其他很多更加優(yōu)秀的方法。
對所有數(shù)據(jù)的高程進(jìn)行統(tǒng)計,建立一個高程分布的直方圖,通過觀察高程分布來確定高程閾值,從而消除分布中最低和最高的小“尾巴”。 通過每個點與周圍點之間的最小高程差來進(jìn)行搜尋仍然存在的孤立點(這里使用一個2D的KD樹來進(jìn)行組織查詢每個點的近鄰點)。 手工校正孤立點自動去除過程中所產(chǎn)生的錯誤。 2.2參數(shù)說明在PTD算法中有以下6個參數(shù)進(jìn)行預(yù)先設(shè)置:
1)最大建筑尺寸m:m是一個長度閾值,此閾值被用來定義格網(wǎng)的大小,隨后算法可以處理建筑物尺寸小于此閾值的建筑物。2)最大地形角度t:t是一個坡度閾值,決定了通過什么方式(是否進(jìn)行設(shè)置鏡像點)去判斷未分類點的類別。如果未分類點所在三角面的坡度大于t則應(yīng)該通過一個鏡像點來進(jìn)行判斷,反之則直接判斷。(后續(xù)在2.4中也會再進(jìn)行詳細(xì)介紹)。3)最大角度θ:θ是三角面與待分類點和最近的三角網(wǎng)頂點之間連線之間的最大角度。如果一個未分類點對應(yīng)的角度大于θ則被標(biāo)記為地物點,否則設(shè)置為地面點。4)最大距離d:d是當(dāng)前迭代中從待判斷點到三角面之間的最大距離,類似的,如果一個未分類點對應(yīng)的最大距離大于d則被標(biāo)記為地物點,否則設(shè)置為地面點。5)最小邊長l:l是構(gòu)建TIN模型中所有三角形最長邊(平面投影)的最小閾值。當(dāng)三角形中的所有邊都小于l時,則停止在三角網(wǎng)中加入地面點(注意l是在平面中計算的)。因此,此參數(shù)可以避免引起地面模型中過高的點密度,以及降低內(nèi)存的使用。6)最大邊長l’:*l’是構(gòu)建TIN模型中所有三角形最短邊(平面投影)的最大閾值,當(dāng)三角形中的所有邊都小于l’*被用于停止處理處理三角形。因此,此參數(shù)用于稀疏地面點,以及降低內(nèi)存的使用。
2.3選擇種子點并構(gòu)建TIN模型對給定的點云數(shù)據(jù)集定義一個特定的“bounding box”并固定左上角坐標(biāo)(xtopleft, ytopleft)右下角坐標(biāo)(xbottomright, ybottomright),寬度w,以及高度h。然后通過上述定義的變量通過以下公式把整個數(shù)據(jù)區(qū)域劃分成nRow行,nColumn列,尺寸大小為m的格網(wǎng)。

其中m,為最大建筑尺寸,ceil(x)函數(shù)代表向上取整,即找到不小于x的最小整數(shù)。
根據(jù)整個數(shù)據(jù)集劃分為格網(wǎng)之后,每個網(wǎng)格中的最低點被設(shè)置為“種子點”(初始地面點)。除此之外,“bounding box”的四個角點也被設(shè)置為“種子點”(其高程值等同于距離最近的種子點高程),如下圖所示:
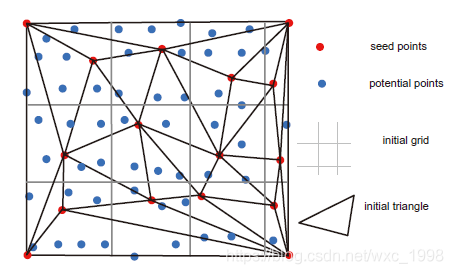
注:把“bounding box”的四個角點也被設(shè)置為“種子點”是為了保證所有點都處于TIN模型內(nèi)部。
隨后,根據(jù)選擇好的種子點來構(gòu)建初始TIN模型來表示初始地表,剩余的點被默認(rèn)標(biāo)記為地物。
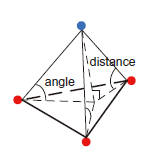
2.4迭代加密TIN模型在每次迭代過程中通過預(yù)先設(shè)置的閾值參數(shù),來對“潛在點(potential point)”進(jìn)行逐點判斷。詳細(xì)步驟如下所述:1)確定潛在點(potential point)的所在位置PPotential(xp,yp,zp),找到其所在的三角形Ttriangle,即PPotential在三角形內(nèi)部或邊緣上或者在頂點上。2)計算三角平面的坡度Striangle,如果Striangle小于預(yù)先設(shè)置的最大地形角度t,則進(jìn)行第3)步,若大于則進(jìn)行第4)步。3)如下圖所示,計算的兩個參數(shù),包括:三角面Ttriangle與待分類點PPotential和最近的三角網(wǎng)頂點之間連線之間的角度,表示為Aangle,以及待分類點PPotential和三角面Ttriangle之間的距離,表示為Ddistance。如果PPotential所對應(yīng)的上述兩個參數(shù)Aangle小于最大角度θ,Ddistance小于最大距離d則認(rèn)為待分類點PPotential是地面點,否則認(rèn)為是地物點。隨后,進(jìn)行下一個點的判斷。
4)如果三角平面的坡度Striangle大于預(yù)先設(shè)置的最大地形角度t則需要設(shè)置PPotential的鏡像點。先找到PPotential所在三角形
Ttriangle中高程值最大的頂點Pvertex(xv,yv,zv),然后通過下式計算PPotential的鏡像點:
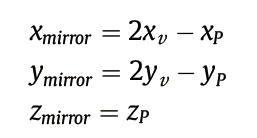
其中(xmirror,ymirror,zmirror)是所求鏡像點的三維坐標(biāo)。
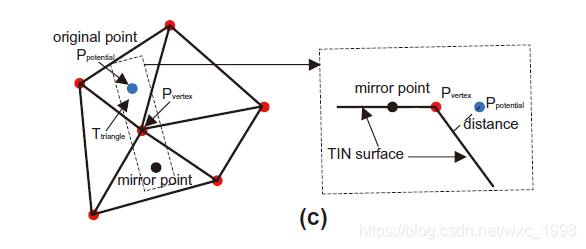
接著對鏡像點使用步驟3)的方式來進(jìn)行計算Aangle與Ddistance兩個參數(shù)進(jìn)行判斷,來決定PPotential的類別。5)在結(jié)束每次迭代之后,新檢測出的地面點通過下述步驟加入TIN模型中。
確定Pground(xg,yg,zg)的坐標(biāo),找到其所在的三角形T’triangle。 計算三角形T’triangle的所有邊在水平投影中的長度,如果任意邊的長度都大于l加入當(dāng)前地面點Pground到TIN模型中,并進(jìn)行刷新。否則,進(jìn)行判斷下一個新檢測的地面點。 重復(fù)上述迭代,直到不再有點被加入到地面點集中。上述五個步驟就是PTD算法的主要實現(xiàn)方法了,PTD算法已經(jīng)被廣泛應(yīng)用在各種類型的景觀(地形)中,且取得不錯的效果。但是需要注意的是,雖然在算法中采用了設(shè)置“鏡像點”的方式來避免出現(xiàn)cutting-off的問題(斷裂線分布區(qū)域),其還是對陡峭地形非常敏感。
到此這篇關(guān)于python 點云地面點濾波-progressive TIN densification(PTD)算法介紹的文章就介紹到這了,更多相關(guān)python PTD點云地面點濾波內(nèi)容請搜索好吧啦網(wǎng)以前的文章或繼續(xù)瀏覽下面的相關(guān)文章希望大家以后多多支持好吧啦網(wǎng)!
相關(guān)文章:
1. ASP中常用的22個FSO文件操作函數(shù)整理2. 無線標(biāo)記語言(WML)基礎(chǔ)之WMLScript 基礎(chǔ)第1/2頁3. ASP調(diào)用WebService轉(zhuǎn)化成JSON數(shù)據(jù),附j(luò)son.min.asp4. .Net core 的熱插拔機(jī)制的深入探索及卸載問題求救指南5. SharePoint Server 2019新特性介紹6. html清除浮動的6種方法示例7. asp的SQL語句中and和or同時使用的注意事項8. 讀大數(shù)據(jù)量的XML文件的讀取問題9. ASP.NET Core 5.0中的Host.CreateDefaultBuilder執(zhí)行過程解析10. React+umi+typeScript創(chuàng)建項目的過程
 網(wǎng)公網(wǎng)安備
網(wǎng)公網(wǎng)安備